vehicle details
- Make and model; Audi A4
- displacement: 2.0L
- output: 136Hp
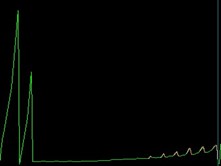

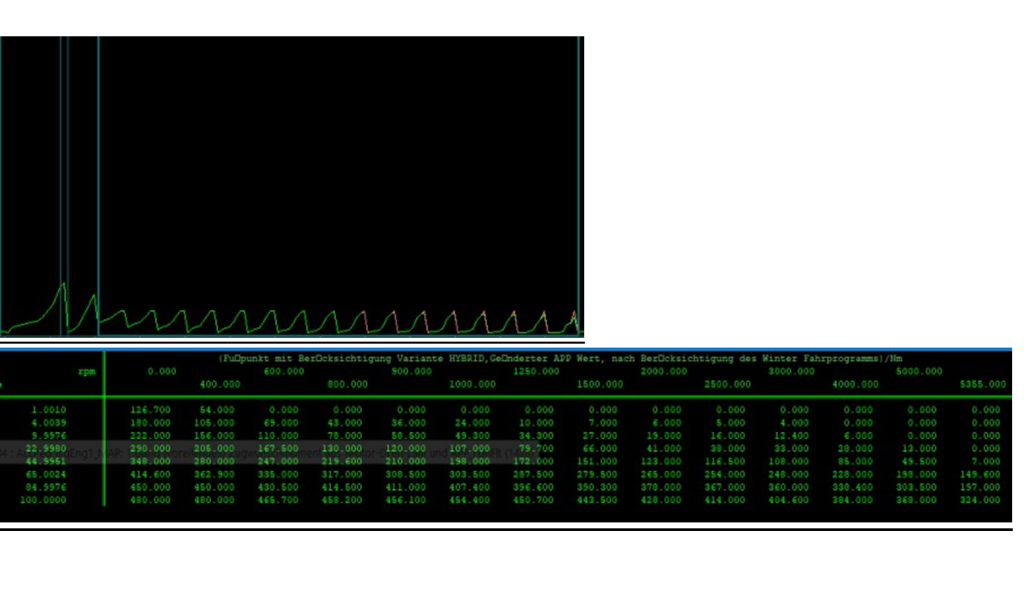
X axis=RPM
Y axis=Injection quantity setpoint without quantity compensation control
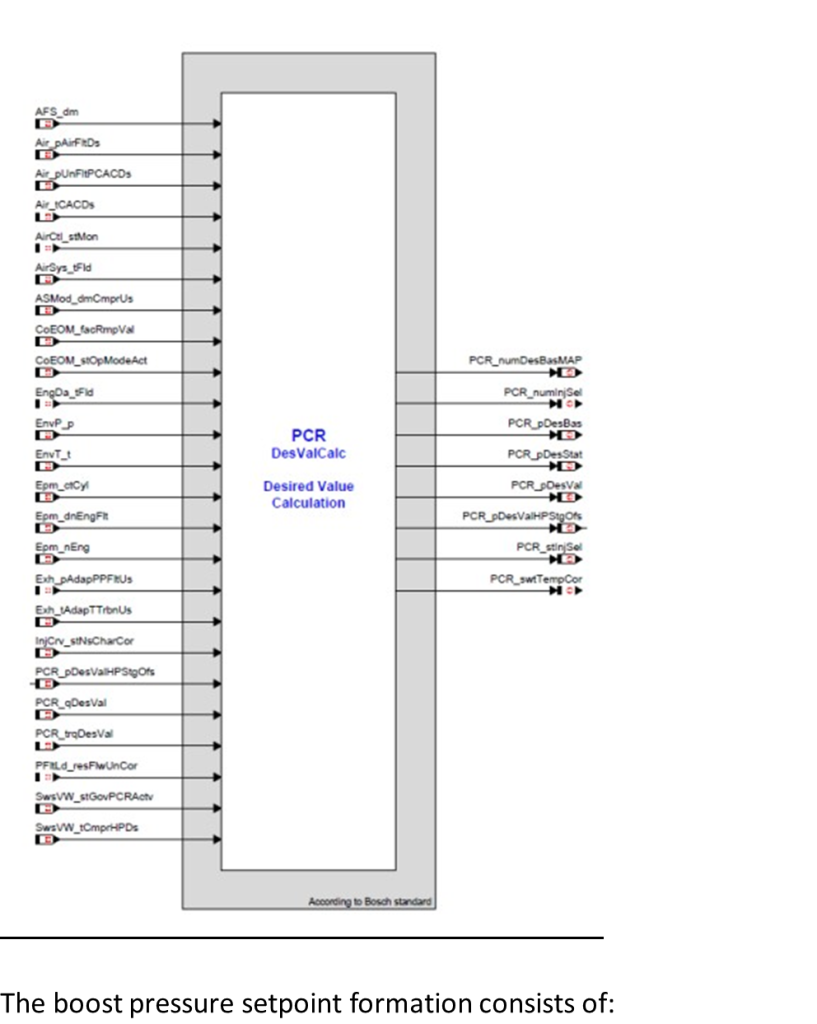
The maximum quantity map InjCrv_qPiI%Max%_MAP and the (operating type-specific) basic map InjCrv_qPiI%Bas%EOM%_MAP are selected via the configurable tables QntMaxTab and QntBasTab. The selection parameters are the pre-injection pattern “stPiIRlsAct”. Pilot injection type “numPiI” and the operating mode “numEOM”:
InjCrv(Injection curve)
The InjCrv component determines all data to display the injection process
Abbreviations used
PiI =pilot injection(Pilot injection is a shorter injection before the main fuel injection, which can provide an environment of high
temperature and pressure for the main injection resulting in a smoother pressure rise and shortened ignition delay for the main injection) MI =main injection
PoI= post-injection
TDC =top dead centre
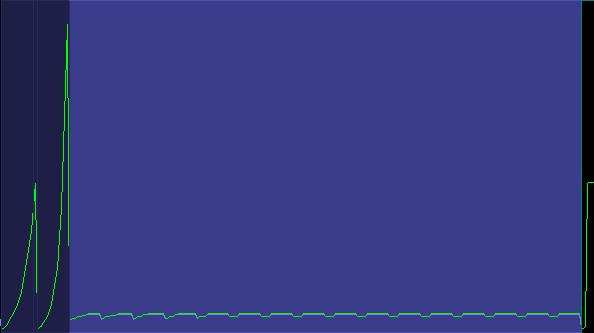
Location of the injections [injcrv_overview_1]
The illustration shows the possible injection curves of a common rail system over time. There are usually 4 per cylinder and working cycle. from 6 different injections possible. Injections may be blocked due to various conditions. The possible ones
Areas in which the respective injections can take place depend on the number of injections and their physical properties.

Which injections are currently active can be found in the injection characteristic InjCrv_stInjCharActVa
boundaries. Which injections are currently active can be seen from the injection characteristics InjCrv_stInjCharActVal
Assignment of the injection characteristics
Bit position meaning
0 Post-injection 1 (PoI1) active
1 Post-injection 2 (PoI2) active
2 Post-injection 3 (PoI3) active
3 Main injection 1 (MI1) active
4 Pilot injection 1 (PiI1) active
5 Pilot injection 2 (PiI2) active
6 Pilot injection 3 (PiI3) active
reserved
Since injections that are close together are subject to a time dependency, it is possible to control the start of the injections PiI1, Display PiI2, PoI2 and PoI3 in angle and/or time. The PiI3 and PoI1 are always displayed in angle, absolute to the TDC.
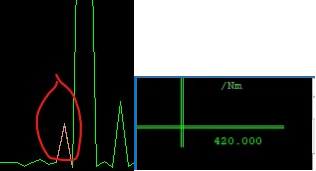
Accelerator pedal map in function monitoring
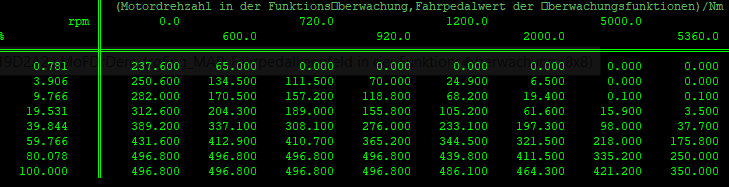
X axis=Engine speed function monitoring
Y axis=Accelerator pedal value of the monitoring functions
Task: Monitoring of driver request processing
Function in the normal mode; Overview of functionality
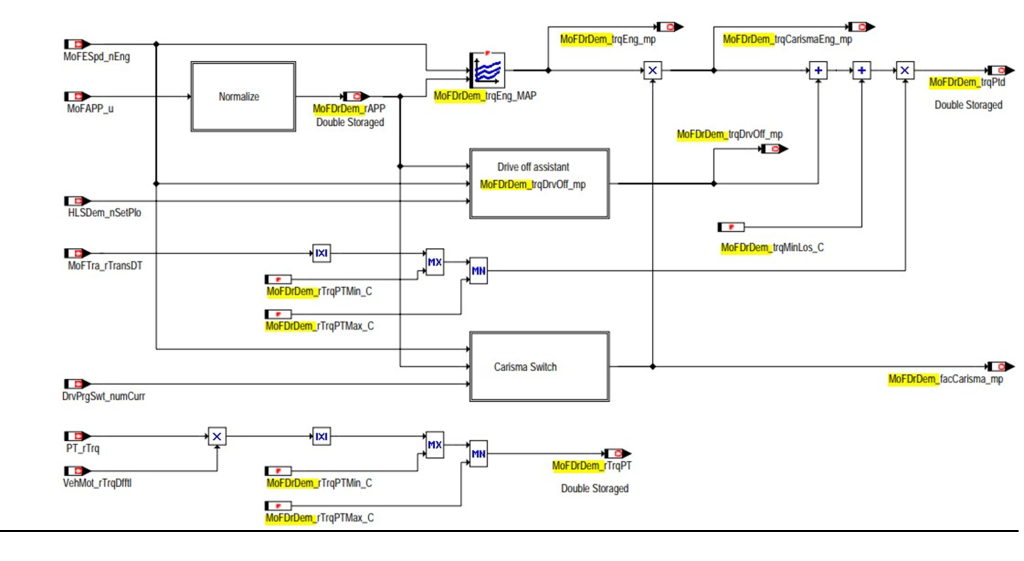
- 1. The functions of the function are the determination of the permissible driver desired torque MoFDrDem_trqPtd (base wheel torque) and the torque transmission ratio of level 2 of the entire drive train from wheel torque to crankshaft torque MoFDrDem_rTrqPT for function monitoring. Furthermore, the accelerator pedal position of level 2 MoFDrDem_rAPP is available.
- 2. The permissible driver’s desired torque is the sum of the driver’s desired torque in towing operation and the total losses (drive train, engine and auxiliary unit loss
- 3. The driver’s desired torque in train operation is determined by interpolating an accelerator pedal map MoFDrDem_trqEng_MAP with the input variables MoFESpd_nEng (engine speed) and MoFDrDem_rAPP (accelerator pedal position).
- 4. The total losses MoFDrDem_trqMinLos_C are deducted from the determined driver desired torque. Before being included in the calculation
- 5. The torque of the drive off assistant MoFDrDem_trqDrvOff_mp is taken into account for the total driver desired torque
- 6. After the loss torque has been taken into account, the basis of the continuous drive train translation MoFTra_rTransDT is created Driver desired torque changed from crankshaft torque to wheel torque
Gear depended desired pulling torque from engine speed and APP_rUnFlt (Driver wish)
- X axis=rpm
- Y axis=pedal value in %
The function provides the path-independent (independent of target or lead path) variables of the driver’s request interpretation.
When driving, up to 4 different maps can be used to determine the driver’s wishes ( AccPed_trqEng1_MAP to AccPed_trqEng4_MAP ).
The inputs into these maps are the speed AccPed_nEng_mp and the accelerator pedal position AccPed_rAPP. The 3rd dimension is the is the
current gear. The gear is determined by using the ratio of engine speed to vehicle speed (v/n ratio) AccPed_rVn TrqEngActv as an input into the characteristic curve AccPed_stMapSel_CUR. Depending on the output of the AccPed_st MapSel_CUR characteristic, a gear is determined and one of the maps AccPed_trqEng1_MAP to AccPed_trqEng4_MAP is selected
current gear. The gear is determined by using the ratio of engine speed to vehicle speed (v/n ratio) AccPed_rVn TrqEngActv as an input into the characteristic curve AccPed_stMapSel_CUR. Depending on the output of the AccPed_st MapSel_CUR characteristic, a gear is determined and one of the maps AccPed_trqEng1_MAP to AccPed_trqEng4_MAP is selected.
Winter driving program
To make it easier to start the car in poor road conditions, the winter driving program offers the option of reducing the accelerator pedal value App_r.
The newly formed, detuned accelerator pedal value is available in AccPed_rApp, which can never be greater than App_r.
In principle, there is a difference between the current driving program (responsible for the current driving behavior) and the target driving program (desired driving behaviour that should be activated).
Map for converting injection quantities into activation duration. Applies to all injections.( InjVlv_tiET_MAP)
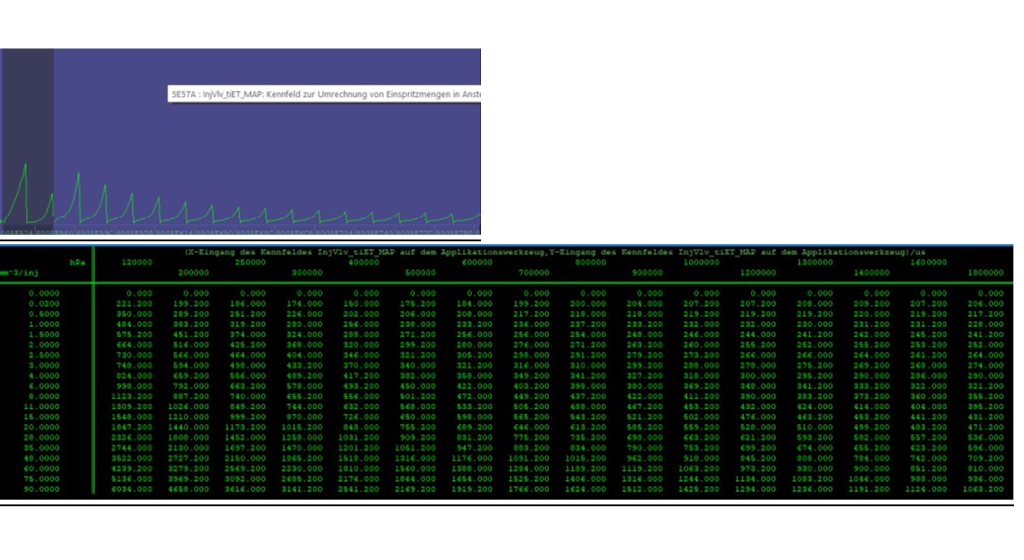
The InjVlv component converts the injection profile required by the InjSys injection system (injection quantities and injection starts) into corresponding control signals for the hardware.
Quantity corrections are made here in order to compensate for any non-ideal properties of the injection valve components. In addition, injector errors are detected as well as diagnostics for the injector control (e.g. load drop, short circuit.
Configuration of the component InjVlv
Configuration of the injection type-specific treatment in the InjVlv component
In InjVlv_CfgLib, the required optional substeps are configured for each injection type to implement the applicable calculation and Select correction functions.
Within the InjVlv component, separate system constants are used to identify the injection types: for dimensioning and
Indexing of many messages, measuring points and work data, as well as selecting the calculation and correction functions to be used.
The available injections are numbered (as in InjCrv) contrary to the chronological order of execution, starting at
“0” and increasing to INJVLV_NUMINJ (7.0)-1. This is followed by the injection types that are not available due to the configuration Values from INJVLV_NUMINJ (7.0) to INJVLV_NUMINJTOT (7)-1.
Note The values of the system constants for the injection types from the InjVlv component are typically not identical to the values the system constants from component InjCrv. Depending on the configuration, the INJVLV_% constants take on different values.
Calculation of the injector activation duration
Calculation of the injector activation duration for all injection types,
The function converts the injection volume into the associated activation duration for any injection.

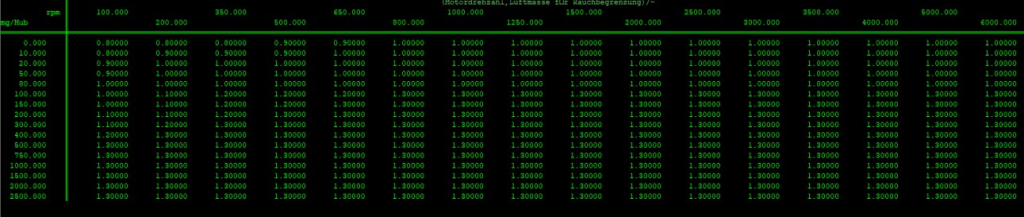
Basic boost pressure setpoint for the operating modes based on the injection quantity
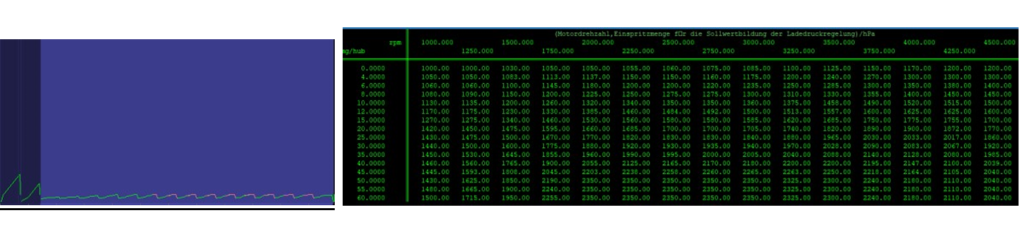
- X axis= Engine speed
- Y axis=Injection quantity for the setpoint formation of the boost pressure control Offset=1
- Task
The boost pressure control setpoint formation adapts the boost pressure setpoint to the current operating conditions. Depending on the speed and the injected fuel quantity, a basic target value is determined. This value depends on various correction variables modified.
Boost pressure – setpoint formation
Static setpoint calculation (Block StatCalc)
Correction of the static target pressure (block VarStatCalcCor)
additional correction of the static target pressure (block VarStatVal1CalcCor)
Dynamic setpoint generation (block VarDynCalc)
Setpoint limitation (block VarLim)
and the offset formation (Block DesValPrep)
The index PCR_numAirTempDesVal_C can be used to select the intake air temperature from the temperature field of the intake tract AirSys_tFld and measured with the measuring point PCR_tAirDesVal_mp.
In the StatCalc block, the setpoint value is calculated in normal operation PCR_pDesValNrm_mp and corrected in the VarStatCalcCor block, resulting in the stationary setpoint PCR_pDesStat. This value can be corrected in the VarStatVal1CalcCor block and results in the corrected stationary Setpoint PCR_pDesStatVal1Cor_mp.
The limited boost pressure setpoint PCR_pDesLim_mp can be modified in the VarLim block and results in the boost pressure setpoint PCR_pDes-
Val.
The factor is determined from the PCR_facEnvTHPDs_MAP map. The input is ambient temperature EnvT_t and one
Model calculated compressor outlet temperature SwsVW_tCmprHPDs used. The factor can then be used in certain driving situations.
Boost pressure must be reduced to protect the charger from excessive temperatures.
To protect components in the charge air path, it is necessary to avoid excessively high temperatures after the compressor in front of the charge air cooler. Special
With the 2-stage charging system, high values can occur that are not reflected in the temperatures according to LLK and therefore cannot be limited in the application at this point via corrections using the Duo sensor.
The static setpoint calculation consists of:
Calculation of the basic value of the boost pressure setpoint – Block BaseMap
Correction of the basic value of the boost pressure setpoint – block VarDesVal2
Correction of the basic value of the boost pressure setpoint – block VarDesVal2Cor
Correction of the basic value of the boost pressure setpoint – block VarDesVal5Cor
In the BaseMap block, depending on the reference variable, the average moptor speed Epm_nEng and the atmospheric pressure EnvP_p, the
Basic value of the boost pressure setpoint PCR_pDesValNrm_mp is calculated.
The stationary boost pressure setpoint with altitude correction PCR_pDesVal1_mp calculated in the BaseMap block becomes additive with the temperature correction value PCR_pTempCor_mp corrects and results in the stationary boost pressure setpoint with temperature correction PCR_pDesVal2_mp. This Value can be corrected in BlockVarDesVal2Cor to the corrected stationary boost pressure setpoint PCR_pDesVal2Cor_mp
Depending on the switch SSwtS_Val.PCR_TempCor_swtVal_C, either a temperature from the temperature field of the intake tract PCR_tAirDesVal_mp or a temperature from the motor temperature field PCR_tEngDesVal_mp is selected.
Basic map for the rail pressure setpoint with injection characters

- x axis= Engine speed
- y axis= Torque generating injection quantity
Offset=100
The high-pressure accumulator stores the fuel at high pressure. It performs the following tasks
- Storing fuel at high pressure
- Determine the weighting factors for correcting the rail pressure setpoint
- Determine the correction values for the rail pressure setpoint
- Determine the rail pressure setpoint
- Calculation of the pilot control values for the pressure control valve (PCV)
- Calculation of the input tax values for the metering unit (MeUn)
- Determining the switching conditions for the Coupled Pressure Control (CPC) and 2-digit controller concepts ➢ Limitations for pressure control via PCV
- Limitations for pressure control via MeUn
- Determination of the controller parameters for pressure control via PCV
- Determination of the controller parameters for pressure control via MeUn
- High pressure control
- Rail pressure monitoring for pressure control via PCV
- Rail pressure monitoring for pressure control via MeUn
- Rail pressure monitoring for pressure control via PCV
- Rail pressure monitoring for pressure control via MeUn
- Rail pressure monitoring when switching to CPC control
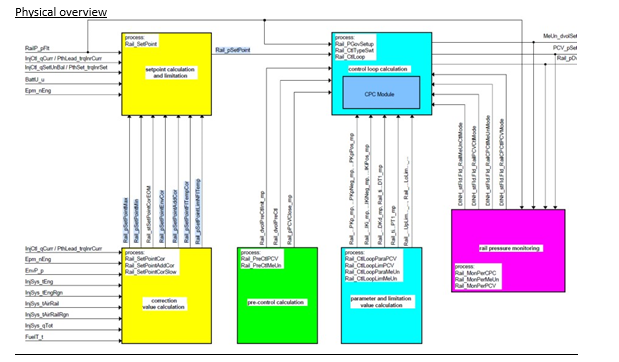
Coordination of the interfaces to the rail
This function is used to coordinate the interfaces to the Rail.
This Figure shows Coordination of the interfaces to the Rail
Functional behavior
1 Selection of the air and engine temperature to be used for the rail pressure setpoint calculation
Overiew
When using the 2-digit concept for the quantity-controlled high-pressure pump, after the engine has started and at low fuel temperatures The rail pressure is regulated via the pressure control valve, in normal operation via the metering unit. The control algorithms are different. The purpose The 2-digit concept offers the advantage of a rapid pressure reduction with the advantage of a high level of pressure generation efficiency connect to. The purpose of the CPC control system is to take advantage of high control dynamics by regulating the pressure via the pressure control valve (PCV) with high efficiency by regulating the pressure via the metering unit (MeUn). In addition to the conventional The CPC control mode is available for PCV and MeUn control. It is characterized by the fact that the pressure is regulated via the pressure control valve while the pump’s delivery capacity is simultaneously throttled by the metering unit.
Calculation of the smoke control quantity
Task
The smoke limitation function limits the development of smoke. The smoke control quantity calculated in this function is that for compliance with a certain smoke value and maximum permissible amount of fuel
- X axis= Engine speed
- Y axis= Air pressure reference value for calculating the amount of smoke
Offset= 0.01
Smoke limitation quantity -overview
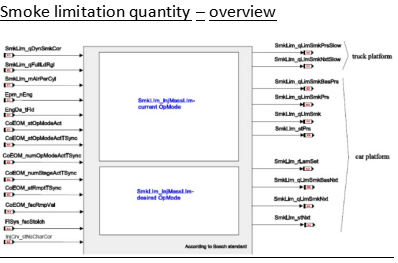
The task of smoke limitation is to determine the maximum amount of fuel that can be injected without a specific smoke emission value to exceed.
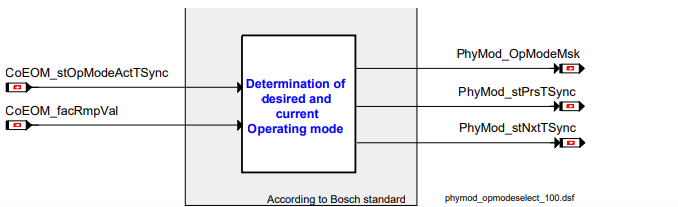
The smoke limitation is structured in such a way that the smoke limitation quantity is set for the current engine operating mode and for the desired one Engine operating mode is calculated.
Smoke control structure
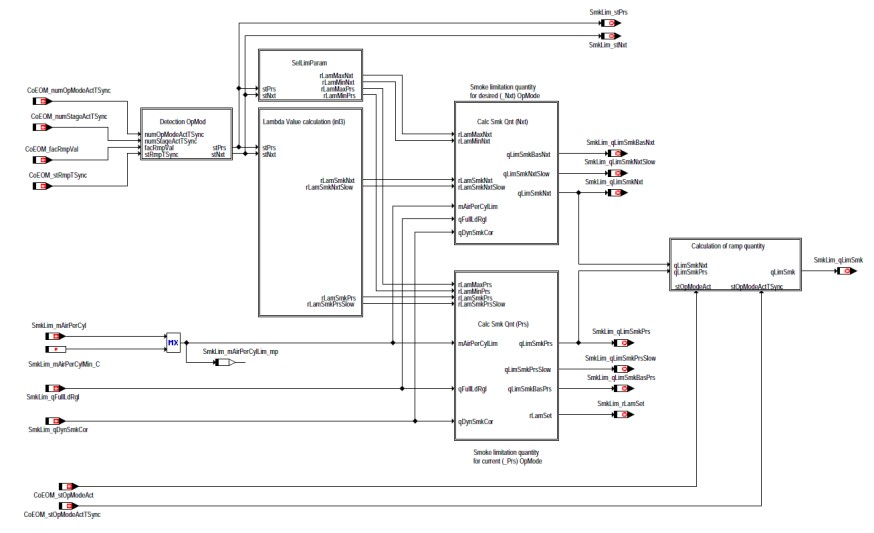
General description of Smklim function blocks: “Detection OpMode”: The “Detection Opmode” function block detects a change in the system’s motor operating mode.”SelLimParam”: In this block, upper and lower limit parameters for limiting the lambda value are selected. These parameters can have different values for different engine operating modes.
“Calculation of Smoke Limitation Quantity (Prs)”: The smoke limitation quantity for the “current engine operating mode” is calculated.
she is the on Maximum permissible amount of fuel to maintain a certain smoke value
“Calculation of Smoke Limitation Quantity (Nxt)”: The smoke limitation quantity for the “desired engine operating mode” is calculated. It is the maximum amount of fuel permitted to maintain a certain smoke value.
“Calculation of Ramp Quantity”: During an operating mode change, there is a smooth change in the ramped smoke limitation quantity from the current smoke limitation quantity to the desired smoke limitation quantity (based on the ramp time of the operating mode coordinator).
Detection OpMode
The “Detection Opmode” function block detects a change in the system’s motor operating mode. The recognition of the operating mode is based on the matrix SmkLim_stOpMode2Map_MAP. The input on the X-axis of the matrix is the number of the active motor operating mode CoEOM_num- OpModeActTSync and the number of the active stage of the CoEOM_numStageActTSync operating mode is shown on the Y axis. This matrix can be configured for different numbers of engine operating modes and operating levels. The outputs of this block are the status the current SmkLim_stPrs and desired SmkLim_stNxt motor operating mode.
Maximum torque at clutch
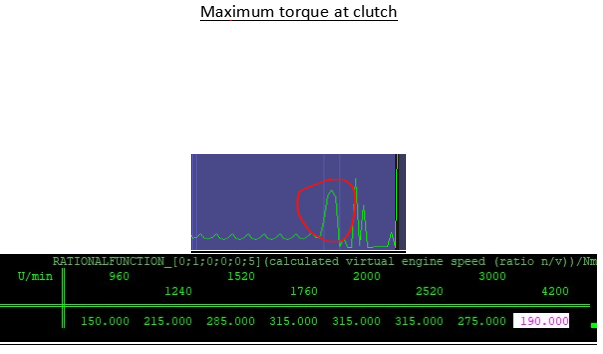
X axis =calculated virtual engine speed
Offset=5
Map for AWD
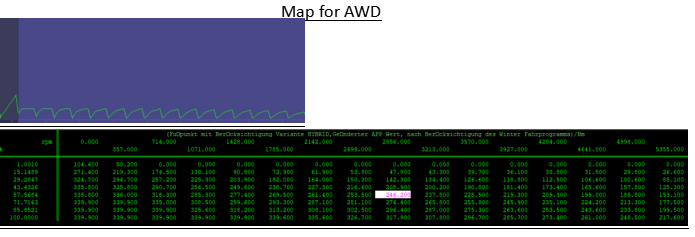
Offset=0.1
Unit=Nm
- X axis=Rpm
maximum engine torque


Unit=Nm
Torque limitation for level vehicles

Offset=1.6
X axis=Vehicle speed
Map for limitation based on atmospheric pressure and speed
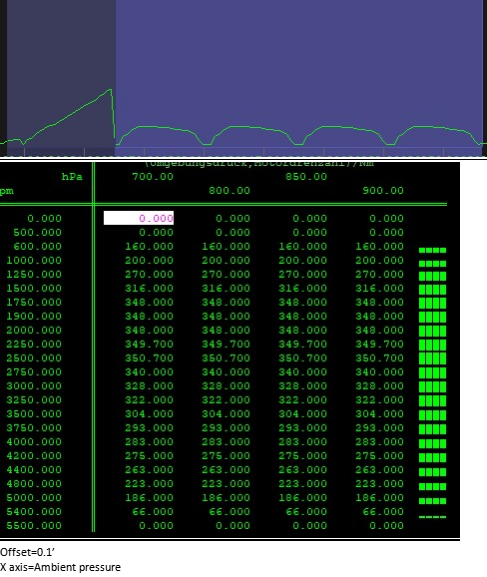
X axis=ambient pressure
Y axis=Engine speed
Lower target pressure hysteresis threshold for locking the PV control
Unit= hPa
Offset=100
Alternative map for lambda value calculation
Offset= 0.001
- X axis=Engine speed
- Y axis=Air mass for smoke control
Lambda and oxygen storage: Based on the lambda of the front lambda sensor (HEGO or UEGO), the lambda before and after the Catalysts and the amount of oxygen stored in the catalysts are modeled depending on the temperature and the modeled oxygen storage capacity of the catalysts. The oxygen storage capacity of the catalytic converters is modeled depending on the temperature, the exhaust gas mass flow, the aging factor and the measured storage capacity. The oxygen storage capacity is measured using a lambda sensor (HEGO) measured in which during the transition from rich to lean the catalyst is completely emptied of oxygen and then completely with it Oxygen is filled or during the transition from lean to rich the catalyst is completely filled with oxygen and then completely emptied
The end of the dew point for a lambda sensor is the moment after starting the engine when all the water has condensed has evaporated above the sensor. Only then can the sensor be completely heated because water droplets touch the hot ceramic of the lambda sensor
can damage. The end of the dew point is reached when the integral of the heat flow is greater than a threshold value. The heat flow becomes calculated from the exhaust gas mass flow and temperature
Lambda control Closed Loop
The closed lambda control loop is needed to reduce pollutant emissions. The closed loop control of the air/fuel ratio in in the combustion chamber is based on the information from the lambda sensor and adjustments to the mixture to achieve the target lambda value.
Lambda setpoint: The desired lambda in the combustion chamber is achieved by coordinating the various requirements of the torque structure (in the case of lean GDI mode), component protection, catalytic heating, catalytic converter cleaning, NOx storage processing and diagnostic functions of the exhaust system is calculated. The lambda setpoint on the lambda probe is determined by the setpoint lambda in Combustion chamber, taking into account the inert gas content in the combustion chamber, the additional air in the exhaust system through additional air or fuel cutoff for some cylinders and the exhaust system dynamics are calculated
Basic moment for the start
Offset=0.1
- X axis=Engine speed
- Y axis=Temperature selected from the motor temperature field EngDa_tFld
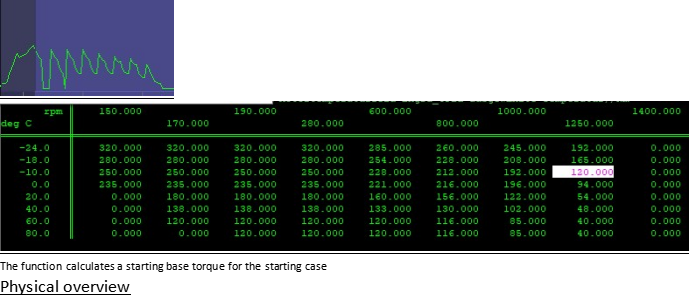
Physical overview
The starting base torque is calculated, limited to a maximum and output as long as the motor coordinator is in the state “COENG_READY” or “COENG_CRANKING”
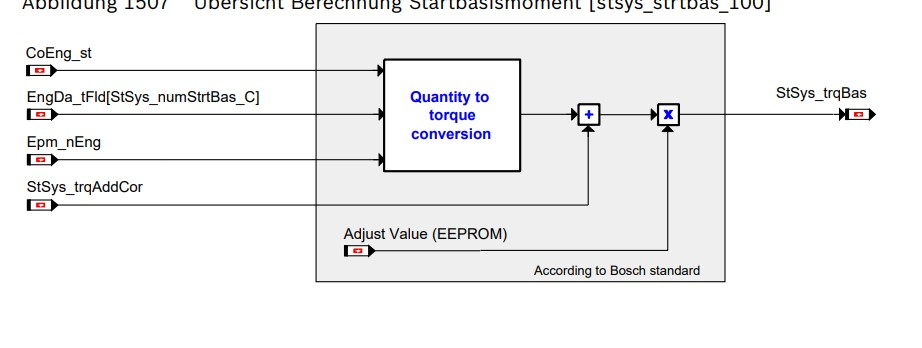
Overview of calculation of starting base torque
Function in normal operation
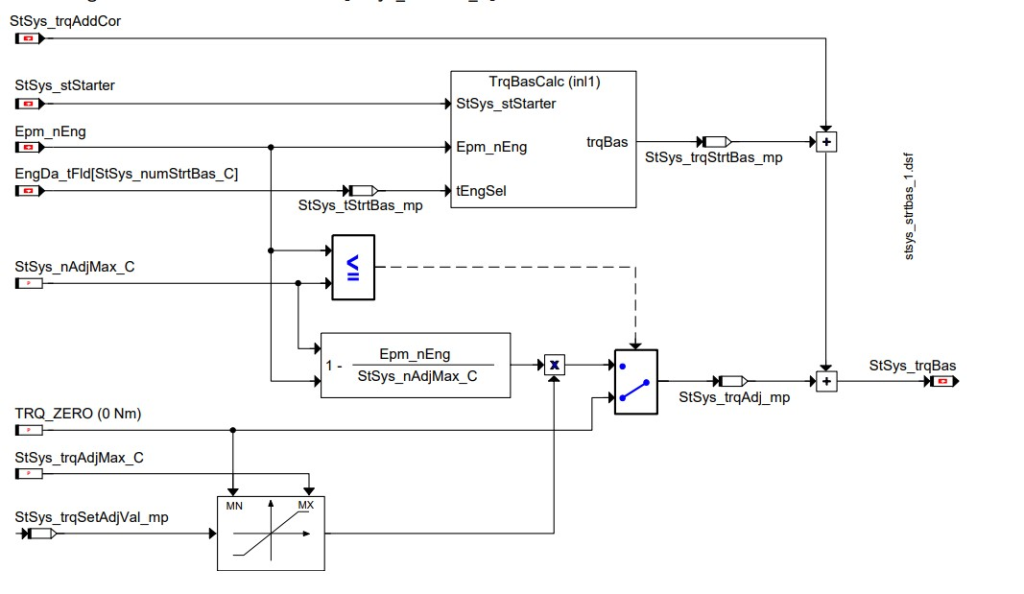
Calculation of the starting base torque
The starting base torque is derived from the motor temperature and speed-dependent map StSys_trqStrtBas_MAP with its output value StSys_trqStrtBas_mp formed. The motor temperature can be selected via the application parameter StSys_numStrtBas_C; the cooling water temperature is preset. In addition, the correction value StSys_trqAdj_mp comes from the formula below and an external one Correction variable StSys_trqAddCor additively into the starting base torque StSys_trqBas.
For the starting torque correction, the adjustment value StSys_trqSetAdjVal_mp from the EEPROM is set to TRQ_ZERO (0 Nm) and a maximum StSys_trqAdjMax_C limited. Formula 33 starting torque correction StSys_trqAdj_mp = StSys_trqSetAdjVal_mp
Starting base torque
ECU initialization
During initialization, the starting base torque StSys_trqBas is set to the value TRQ_ZERO (0 Nm). The adjustment value StSys_trqSet AdjVal_mp is read from the EEPROM.
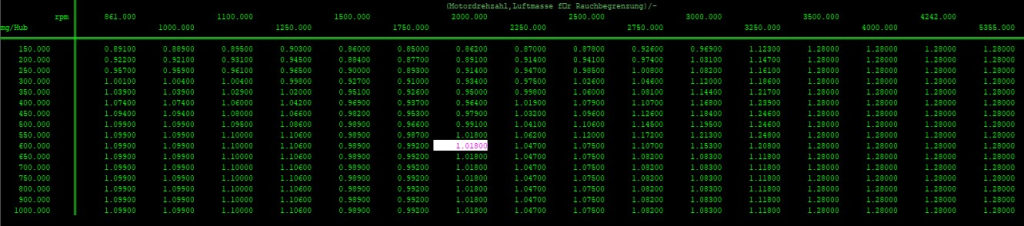
Basic engine map for torque/quantity conversion (PFlt10)
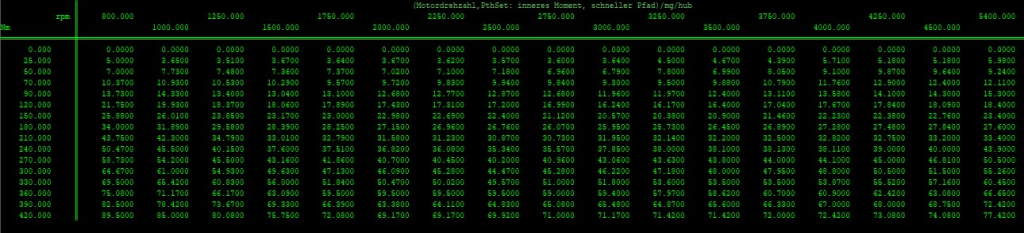
X axis=engine speed
Y axis= PthSet: inner moment, fast path
Offset= 0.01
Unit=mg/hub
Function in normal operation
The component provides four routines:
- Checking the data of the basic engine map
- Formation of two characteristics that are used as a basis for torque/quantity conversion with the basic engine maps, one for each Conversion of the current and future (desired) setpoints.
- 3.Conversion from quantity to moment for current and future (desired) setpoints
- 4.Conversion of moment into quantity for current and future (desired) setpoints
Checking the data of the basic engine map
The prerequisite for using the characteristic curve (see below) for the conversion from quantity to moment is a strictly monotonically increasing course of the
Quantity support points above the torque base values, since only in this case the database is carried out in the sense of a torque versus quantity characteristic curve Interpolation can be evaluated. The prerequisite for this condition is again that the course of the quantity support points above the Torque axis (for each speed reference point) in the basic engine maps used is strictly monotonically increasing. During initialization, this condition is checked and the result is entered in the error path DFC_PhyModNonMonMapNpl.
Calculation of two characteristic curves for converting quantity into moment and vice versa
A speed cut is calculated for the current speed Epm_nEng from the basic engine map selected for the current operating mode (BA). I.e.: Through linear interpolation in the speed direction, a quantity reference point for the current one is created for each reference point from the basic engine map Characteristic curve calculated.
The same principle is used to create a characteristic curve for converting the future (desired) setpoints from the one selected for the future BA Basic engine map, formed
Conversion from quantity to moment
Two functions are provided, by calling which the conversion is carried out, each for current and future (desired) Setpoints. Operating modes supported in the torque structure In the current configuration of the torque structure, the following operating modes are supported, with stages if necessary:
Note All operating modes supported in the torque structure are displayed in the axis PhyMod_OpMode_AXIS in the form of “Operating mode [Level]” or in the operation mask array PhyMod_OpModeMsk.
PhyMod_OpMode_AXIS and PhyMod_OpModeMsk were preconfigured and cannot be used
Calculation of the lambda value depending on the speed and the air mass value
Offset= 0.001
- X axis=Engine speed
- Y axis=Air mass for smoke control
Maximum internal engine torque of the control unit monitoring.
Unit= Nm
Offset=0.1